Расшифровка нейронного ключа к эффективной ходьбе человека на разных скоростях
Мы обычно не задумываемся об этом, занимаясь этим, но ходьба - это сложная задача. Контролируемая нашей нервной системой, наши кости, суставы, мышцы, сухожилия, связки и другие соединительные ткани (т.е. опорно-двигательный аппарат) должны двигаться согласованно и реагировать на неожиданные изменения или помехи на разных скоростях высокоэффективным образом. Воспроизведение этого в робототехнике - непростая задача.
Теперь исследовательская группа из Высшей школы инженерии Тохокского университета воспроизвела человекоподобную ходьбу с переменной скоростью с использованием мускулоскелетной модели - управляемой методом рефлексивного контроля, отражающего человеческую нервную систему. Этот прорыв в биомеханике и робототехнике устанавливает новый эталон в понимании движения человека и прокладывает путь к инновационным робототехническим технологиям.
Подробности их исследования были опубликованы в журнале PLoS Computational Biology 19 января 2024 года.
"В нашем исследовании мы столкнулись со сложной задачей воспроизведения эффективной ходьбы на разных скоростях - ключевым элементом механизма человеческой ходьбы", - отмечает доцент Дай Оваки, соавтор исследования вместе с Сюнсукэ Косэки и профессором Мицухиро Хаяшибе. "Эти открытия имеют важное значение для продвижения границ понимания человеческой локомоции, адаптации и эффективности."
Достижение стало возможным благодаря инновационному алгоритму. Алгоритм вышел за рамки традиционного метода наименьших квадратов и помог разработать модель нейронной цепи, оптимизированную для энергоэффективности на различных скоростях ходьбы. Интенсивный анализ этих нейронных цепей, особенно тех, которые контролируют мышцы в фазе размахивания ноги, раскрыл ключевые элементы стратегий экономии энергии при ходьбе. Эти открытия улучшают наше понимание сложных механизмов нейронных сетей, лежащих в основе человеческой походки и ее эффективности.
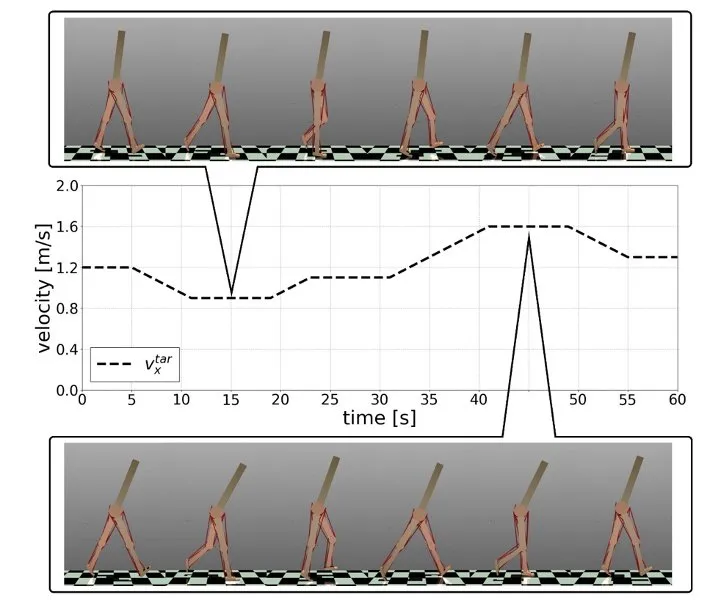
Симуляция ходьбы, которая точно изменяет скорость в ответ на входную целевую скорость (vxtar) с использованием мускулоскелетной модели, имитирующей человека. Существующий рефлексивный контроль не мог точно изменить скорость ходьбы. Тохокский университет
Оваки подчеркивает, что знания, полученные в исследовании, помогут заложить основу для будущих технологических достижений. "Успешное имитирование ходьбы с переменной скоростью в мускулоскелетной модели, сочетающееся со сложной нейронной схемой, является ключевым прогрессом в объединении нейронауки, биомеханики и робототехники. Это революционизирует проектирование и разработку высокопроизводительных двуногих роботов, передовых протезных конечностей и передовых экзоскелетов с электроприводом."
Такие разработки могут улучшить мобильные решения для людей с ограниченными возможностями и продвинуть робототехнические технологии, используемые в повседневной жизни.
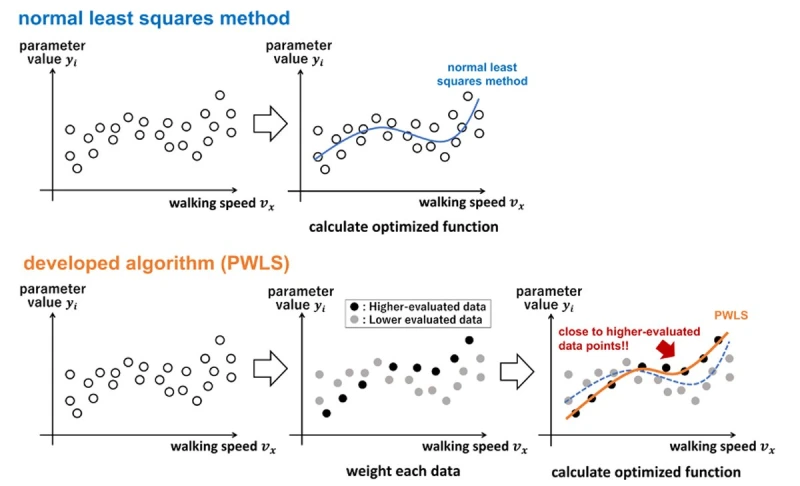
Схематический обзор предложенного алгоритма оптимизации (PWLS). Построенные точки данных показывают взаимосвязь между значениями параметров управления и воспроизводимыми скоростями ходьбы. Если функция, выражающая эту взаимосвязь, была получена с использованием общего метода наименьших квадратов, то данные, генерирующие энергоэффективную и неэнергоэффективную походку, не различаются и оцениваются одинаково. В предложенном PWLS, добавляя веса на основе оценочных значений (энергоэффективности) к точкам данных, генерирующим энергоэффективную ходьбу, можно получить взаимосвязь между скоростью ходьбы и параметрами управления, реализующими высокоэффективную ходьбу, и построить модель нейронной цепи, позволяющую генерировать более энергоэффективную ходьбу. Тохокский университет
Впереди Оваки и его команда надеются дополнительно усовершенствовать рефлексивный контроль для воссоздания более широкого диапазона скоростей и движений человеческой ходьбы. Они также планируют применить полученные знания и алгоритмы из исследования для создания более адаптивных и энергоэффективных протезов, электроприводных костюмов и двуногих роботов. Это включает в себя интеграцию выявленных нейронных цепей в эти приложения для улучшения их функциональности и естественности движений.
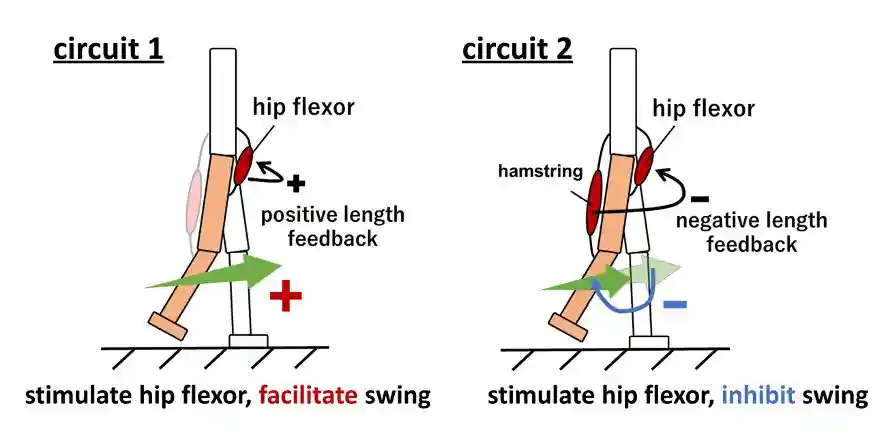
Два выявленных нейронных контура способствуют энергоэффективной ходьбе на широком диапазоне скоростей в рефлексивном контроле: первый - это рефлексивная цепь, связанная с мышцей внутренней широкой бедренной, которая облегчает передний размах ноги; второй - это рефлексивная цепь, связанная с мышцей внутренней широкой бедренной и бицепсом бедра, которая ингибирует передний размах ноги. Тохокский университет
Источник